Lorsque nous prenons quelque chose, nous le bousculons souvent un peu, cherchant à obtenir la meilleure prise. Une équipe de chercheurs a maintenant développé une main robotique qui fait quelque chose de similaire – une percée qui pourrait faire progresser le domaine des robots d’assistance.

Crédit photo : Université de Yale (image fixe de la vidéo YouTube)
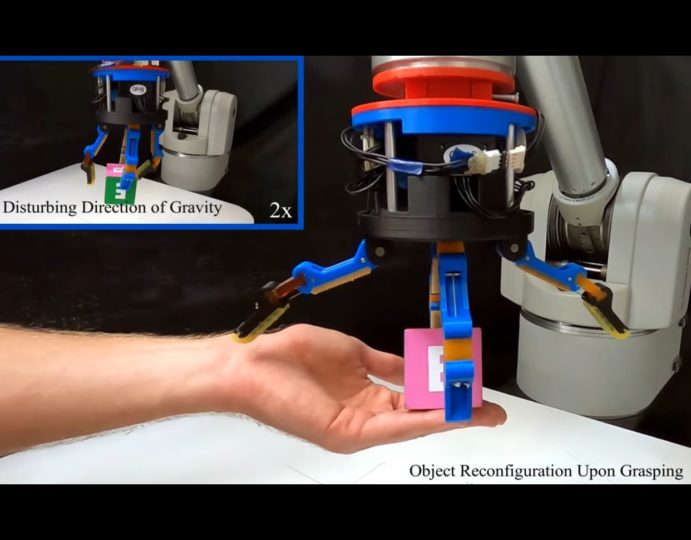
Dans le laboratoire d’Aaron Dollar, professeur de génie mécanique, de science des matériaux et d’informatique, l’équipe a créé une main robotique capable de faire pivoter complètement divers objets, même si ses pinces rompent parfois le contact avec l’objet. Les résultats ont été publiés récemment dans Lettres sur la robotique et l’automatisation.
Andrew Morgan, un doctorat. candidat dans le laboratoire de Dollar et auteur principal de l’étude, a déclaré que l’équipe avait entrepris de créer un appareil “où les doigts s’ouvrent et se ferment toujours, déplaçant leur emplacement sur l’objet réel”.
Un doctorat précédent. étudiant, Raymond Ma, a développé le concept original de la main. Pour la nouvelle version, Morgan a modifié la conception pour permettre des capacités en main plus avancées. Celles-ci incluent de nouvelles conceptions du bout des doigts et une adaptation de la rotation interne du poignet.
Une application potentielle, a-t-il dit, est à des fins d’assemblage. Par exemple, l’appareil peut saisir un objet et le réorienter afin qu’il puisse l’insérer dans une fente ou le placer d’une certaine manière.
Les chercheurs ont cherché à rendre la main relativement simple, avec le moins de technologie de capteur possible. Le but est de fabriquer un appareil pratique qui ne soit pas trop cher ou qui nécessite trop d’entretien. “Cela nous a obligés à créer un système plus robuste que ce qui était traditionnellement requis”, a déclaré Morgan.
Pour faire bouger la pince, l’équipe utilise une transmission sous-actionnée, entraînée par des tendons, qui, selon Morgan, est “plus indulgente” en raison de sa nature adaptative passive inhérente. C’est-à-dire qu’il y a moins de moteurs qu’il n’y a d’articulations dans la main, ce qui fait que la main bouge de telle manière qu’elle s’enveloppe mieux dans son environnement. “Nous n’avons pas besoin d’en savoir autant sur l’environnement que vous normalement le ferait », a-t-il dit.
Une avancée notable dans la conception est que l’appareil dispose également d’une caméra qui suit en temps réel la position de l’objet qu’il manipule.
“En couplant la nature adaptative de la main et cette rétroaction externe, nous avons pu contrôler la main uniquement à partir de la vision et sans capteurs tactiles”, a déclaré Morgan. “Nous utilisons le retour de cette caméra, de sorte qu’elle dise toujours” Hé, vous venez de faire une action – à quel point cette action était-elle bonne et comment pouvons-nous nous assurer que la prochaine action sera meilleure?”
L’appareil a manipulé avec succès des objets de formes variées, notamment une sphère, une petite voiture, un lapin en plastique et un canard en plastique.
“Nous avons pu accomplir des tâches de manipulation manuelle assez complexes qui ont toujours été très difficiles à réaliser pour un robot”, a déclaré Morgan.
S’appuyant sur le projet, Morgan a déclaré qu’ils aimeraient tester les limites de l’appareil en l’essayant sur une plus grande variété d’objets.
“En fin de compte, nous essayons de construire des robots de service plus performants, donc tester des tâches à domicile serait intéressant et utile”, a-t-il déclaré. Cela pourrait inclure ramasser de la vaisselle, a-t-il dit, ou manipuler une brosse et la placer dans un support.
La source: Université de Yale





