Le rover Perseverance Mars de la NASA essaie de couvrir plus de distance en un seul mois que n’importe quel rover avant lui – et il le fait en utilisant l’intelligence artificielle. Sur le chemin à venir se trouvent des bacs à sable, des cratères et des champs de roches pointues que le rover devra parcourir par lui-même. À la fin du voyage de 3 miles (5 kilomètres), qui a commencé le 14 mars 2022, Persévérance atteindra un ancien delta de rivière dans le cratère de Jezero, où un lac existait il y a des milliards d’années.
Ce delta est l’un des meilleurs endroits sur Mars pour que le rover recherche des signes de vie microscopique passée. En utilisant une perceuse au bout de son bras robotique et un système de prélèvement d’échantillons complexe dans son ventre, Persévérance collecte des carottes de roche pour le retour sur Terre – la première partie du Campagne de retour d’échantillons sur Mars.
“Le delta est si important que nous avons en fait décidé de minimiser les activités scientifiques et de nous concentrer sur la conduite pour y arriver plus rapidement”, a déclaré Ken Farley de Caltech, scientifique du projet Perseverance. « Nous prendrons beaucoup d’images du delta pendant ce trajet. Plus nous nous rapprochons, plus ces images seront impressionnantes.

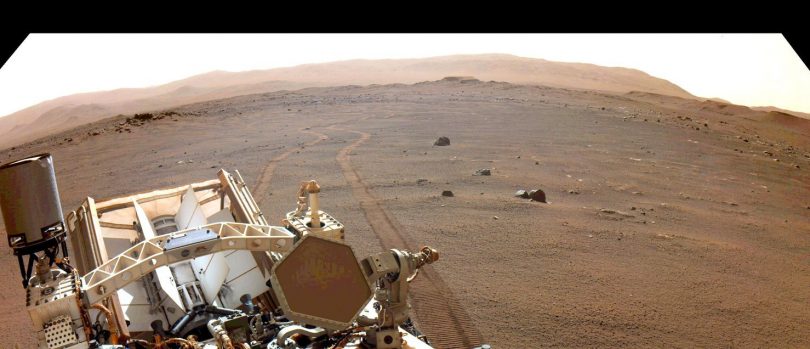
Le rover Perseverance Mars de la NASA revient sur ses traces de roues le 17 mars 2022, le 381e jour martien, ou sol, de la mission. Crédit : NASA/JPL-Caltech
L’équipe scientifique recherchera dans ces images les roches qu’elles voudront éventuellement étudier plus en détail à l’aide des instruments du bras de Persévérance. Ils rechercheront également les meilleurs itinéraires que le rover peut emprunter pour gravir le delta de 130 pieds de haut (40 mètres de haut).
Mais d’abord, Persévérance doit y arriver. Le rover le fera en s’appuyant sur sa conduite autonome Navigation automatique système, qui a déjà établir des records de distance impressionnants. Alors que tous les rovers martiens de la NASA ont des capacités d’auto-conduite, Persévérance a le plus avancé à ce jour.
“Les processus d’auto-conduite qui prenaient quelques minutes sur un rover comme Opportunity se produisent en moins d’une seconde sur Persévérance”, a déclaré Mark Maimone, planificateur de rover vétéran et développeur de logiciels de vol du Jet Propulsion Laboratory de la NASA en Californie du Sud, qui dirige la mission. “Parce que la conduite autonome est désormais plus rapide, nous pouvons couvrir plus de terrain que si les humains programmaient chaque conduite.”
Le rover Perseverance Mars de la NASA suivra l’itinéraire proposé vers le delta du cratère Jezero illustré dans cette animation ci-dessus. Le delta est l’un des endroits les plus importants que le rover visitera alors qu’il recherche des signes de vie ancienne sur Mars.
Comment fonctionne la planification des rovers
Avant que le rover ne roule, une équipe d’experts en planification de la mobilité (Persévérance en compte 14 qui échangent des quarts de travail) rédige les commandes de conduite que l’explorateur robotique exécutera. Les commandes atteignent Mars via la NASA Réseau de l’espace lointain, et Perseverance renvoie des données afin que les planificateurs puissent confirmer la progression du rover. Plusieurs jours sont nécessaires pour terminer certains plans, comme pour un lecteur récent qui s’étendait sur environ 1 673 pieds (510 mètres) et comprenait des milliers de commandes de rovers individuelles.
Certains lecteurs nécessitent plus d’intervention humaine que d’autres. AutoNav est utile pour les trajets sur un terrain plat avec des dangers potentiels simples – par exemple, de gros rochers et des pentes – qui sont faciles à détecter et à contourner pour le mobile.
Penser en conduisant
AutoNav reflète une évolution des outils de conduite autonome précédemment développés pour les rovers Spirit, Opportunity et Curiosity de la NASA. Ce qui est différent pour AutoNav, c’est “penser en conduisant” – permettant à Perseverance de prendre et de traiter des images tout en se déplaçant. Le rover navigue ensuite en fonction de ces images. Ce rocher est-il trop proche ? Son ventre pourra-t-il dégager ce rocher ? Et si les roues du rover venaient à patiner ?
Le matériel mis à niveau permet de “penser en conduisant”. Des caméras plus rapides signifient que Perseverance peut prendre des images assez rapidement pour traiter son itinéraire en temps réel. Et contrairement à ses prédécesseurs, Persévérance dispose d’un ordinateur supplémentaire entièrement dédié au traitement d’image. L’ordinateur s’appuie sur une micropuce ultra-efficace à usage unique appelée matrice de portes programmable sur le terrain, idéale pour le traitement de la vision par ordinateur.
“Sur les anciens rovers, l’autonomie signifiait ralentir car les données devaient être traitées sur un seul ordinateur”, a déclaré Maimone. “Cet ordinateur supplémentaire est incroyablement rapide par rapport à ce que nous avions par le passé, et le fait qu’il soit dédié à la conduite signifie que vous n’avez pas à partager les ressources informatiques avec plus de 100 autres tâches.”
Bien sûr, les humains ne sont pas complètement hors de propos pendant les trajets AutoNav. Ils planifient toujours l’itinéraire de base en utilisant des images prises depuis l’espace par des missions comme Mars Reconnaissance Orbiter de la NASA. Ensuite, ils marquent les obstacles tels que les trappes de sable potentielles que Persévérance doit éviter, en dessinant des zones “à éviter” et “à éviter” qui l’aident à naviguer.
Une autre grande différence est le sens de l’espace de Persévérance.
Le programme de navigation autonome de Curiosity maintient le rover dans une bulle de sécurité de 16 pieds (5 mètres) de large. Si Curiosity repère deux rochers distants, disons, de 15 pieds (4,5 mètres) – un espace dans lequel il pourrait facilement naviguer – il s’arrêtera ou se déplacera autour d’eux plutôt que de risquer de les traverser.
Mais la bulle de Persévérance est beaucoup plus petite : une boîte virtuelle est centrée sur chacune des six roues du rover. Le plus récent rover de Mars a une compréhension plus sensible du terrain et peut contourner les rochers par lui-même.
“Lorsque nous avons considéré le cratère Jezero pour la première fois comme un site d’atterrissage, nous étions préoccupés par les champs denses de roches que nous avons vus dispersés sur le fond du cratère”, a déclaré Maimone. “Maintenant, nous pouvons contourner ou même chevaucher des rochers que nous n’aurions pas pu approcher auparavant.”
Alors que les précédentes missions de rover exploraient plus lentement le long de leur chemin, AutoNav offre à l’équipe scientifique la possibilité de se rendre aux endroits qu’ils privilégient le plus. Cela signifie que la mission est plus concentrée sur son objectif principal : trouver les échantillons que les scientifiques voudront éventuellement ramener sur Terre.
En savoir plus sur la mission
Un objectif clé de la mission de Persévérance sur Mars est astrobiologie, y compris la recherche de signes de vie microbienne ancienne. Le rover caractérisera la géologie et le climat passé de la planète, ouvrira la voie à l’exploration humaine de la planète rouge et sera la première mission à collecter et à mettre en cache la roche et le régolithe martiens (roche brisée et poussière).
Les missions ultérieures de la NASA, en coopération avec l’ESA (Agence spatiale européenne), enverraient des engins spatiaux sur Mars pour collecter ces échantillons scellés à la surface et les renvoyer sur Terre pour une analyse approfondie.
La mission Mars 2020 Perseverance fait partie de l’approche d’exploration Moon to Mars de la NASA, qui comprend Artémis missions sur la Lune qui aideront à préparer l’exploration humaine de la planète rouge.
JPL, qui est géré pour la NASA par Caltech à Pasadena, en Californie, a construit et gère les opérations du rover Perseverance.
La source: JPL





