Le Tin Man n’en avait pas. Le Grinch’s était trop petit de trois tailles. Et pour les robots mous, les pompes alimentées électroniquement qui fonctionnent comme leur « cœur » sont si volumineuses et rigides qu’elles doivent être découplées du corps du robot. Cette séparation peut entraîner une fuite d’énergie et rendre les bots moins efficaces.

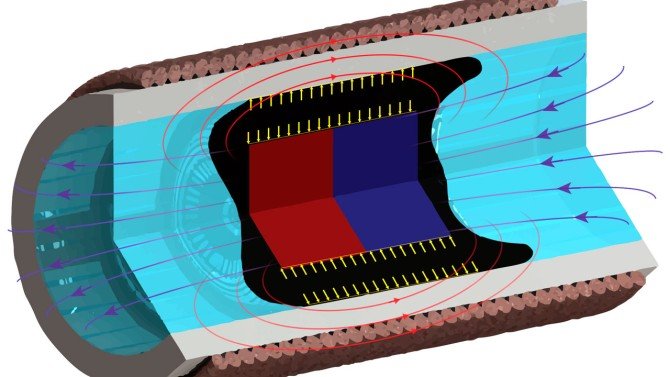
Une nouvelle pompe déformable pour robots mous se compose d’un tube en silicone avec des bobines de fil – appelées solénoïdes – espacées autour de son extérieur. À l’intérieur du tube se trouve un aimant à noyau solide qui se déplace d’avant en arrière, un peu comme un piston flottant, pour pousser les fluides vers l’avant avec une force continue. Crédit image : Université Cornell
Maintenant, une collaboration entre des chercheurs de Cornell et le laboratoire de recherche de l’armée américaine a exploité les forces hydrodynamiques et magnétiques pour entraîner une pompe caoutchouteuse et déformable qui peut fournir aux robots mous un système circulatoire, imitant la biologie des animaux.
“Ces pompes douces distribuées fonctionnent beaucoup plus comme les cœurs humains et les artères à partir desquelles le sang est délivré”, a déclaré Rob Berger, professeur agrégé de génie mécanique et aérospatial au College of Engineering, qui a dirigé l’équipe de Cornell. “Nous avons eu sang de robot que nous avons publié de notre groupe, et maintenant nous avons des cœurs de robot. La combinaison des deux rendra les machines plus réalistes.
Le journal du groupe, “Lévitation magnétohydrodynamique pour pompes flexibles hautes performances», a été publié dans Actes de l’Académie nationale des sciences. L’auteur principal de l’article était le chercheur postdoctoral Yoav Matia.
Bergers Laboratoire de robotique organique a déjà utilisé des composites de matériaux souples pour tout concevoir, de capteur extensible “peau” à afficheurs braille à combustion et vêtements qui surveillent les performances sportives – plus une ménagerie de robots mous qui peuvent marcher et ramper et nager et sueur. De nombreuses créations du laboratoire pourraient avoir des applications pratiques dans les soins aux patients et la réadaptation.
Comme les animaux, les robots mous ont besoin d’un système circulatoire pour stocker l’énergie et alimenter leurs appendices et leurs mouvements pour accomplir des tâches complexes.
La nouvelle pompe en élastomère se compose d’un tube en silicone souple équipé de bobines de fil – appelées solénoïdes – espacées autour de son extérieur. Les espaces entre les bobines permettent au tube de se plier et de s’étirer. À l’intérieur du tube se trouve un aimant à noyau solide entouré d’un fluide magnétorhéologique – un fluide qui se raidit lorsqu’il est exposé à un champ magnétique, ce qui maintient le noyau centré et crée une étanchéité cruciale. Selon la façon dont le champ magnétique est appliqué, l’aimant central peut être déplacé d’avant en arrière, un peu comme un piston flottant, pour pousser les fluides – tels que l’eau et les huiles à faible viscosité – vers l’avant avec une force continue et sans blocage.
“Nous opérons à des pressions et des débits qui sont 100 fois supérieurs à ce qui a été fait dans d’autres pompes douces”, a déclaré Shepherd, co-auteur principal de l’article avec Nathan Lazarus du US Army Research Laboratory. « Par rapport aux pompes dures, nos performances sont encore environ 10 fois inférieures. Cela signifie donc que nous ne pouvons pas pousser des huiles très visqueuses à des débits très élevés. »
Les chercheurs ont mené une expérience pour démontrer que le système de pompe peut maintenir une performance continue sous de grandes déformations. Ils ont suivi les paramètres de performance afin que les futures itérations puissent être personnalisées pour différents types de robots.
“Nous avons pensé qu’il était important d’avoir des relations d’échelle pour tous les différents paramètres de la pompe, de sorte que lorsque nous concevons quelque chose de nouveau, avec différents diamètres de tube et différentes longueurs, nous sachions comment nous devrions régler la pompe pour les performances que nous voulons, », a déclaré Berger.
La source: L’Université de Cornell





