Une équipe de chercheurs basée à l’Université Duke et financée en partie par la US National Science Foundation a mis à profit son expérience en tomographie par cohérence optique – connue sous le nom d’OCT, un test non invasif utilisé pour imager la rétine – pour affiner et améliorer la technologie de vision pour les robots et l’auto- conduire des voitures.
Le lidar traditionnel, abréviation de détection et télémétrie de la lumière, ne fonctionne pas de manière optimale dans les applications 3D en raison de la faiblesse des signaux provenant de la faible lumière réfléchie ou de la lumière directe du soleil. L’équipe a cherché une solution et s’est tournée vers une forme de lidar appelée onde continue modulée en fréquence, ou lidar FMCW.

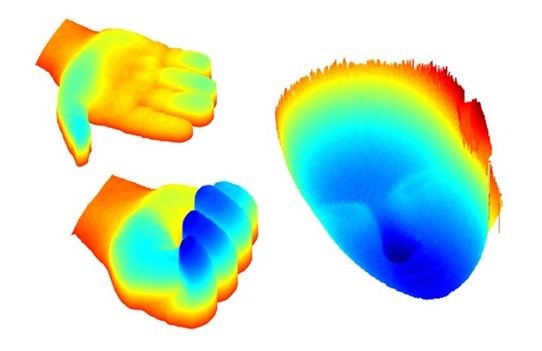
Les progrès de l’imagerie pourraient aider les voitures et les robots à voir des caractéristiques à l’échelle millimétrique. Crédit image : Ruobing Qian, Duke University
« Le lidar FMCW partage le même principe de fonctionnement que l’OCT, que le domaine du génie biomédical développe depuis le début des années 1990 », a déclaré Ruobing Qian, l’un des auteurs de l’étude publiée dans Communication Nature. « Mais il y a 30 ans, personne ne savait que les voitures ou les robots autonomes seraient une chose, alors la technologie s’est concentrée sur l’imagerie des tissus. Maintenant, pour le rendre utile pour ces autres domaines émergents, nous devons échanger ses capacités de résolution extrêmement élevée contre plus de distance et de vitesse.
La technologie lidar FMCW envoie un faisceau laser qui se déplace entre différentes fréquences tandis que le détecteur mesure le temps de réflexion de la lumière, en distinguant différents modèles de fréquence et sources lumineuses. La technologie adaptable et à grande vitesse est efficace dans des conditions variables.
Au lieu des miroirs rotatifs utilisés dans le lidar traditionnel, l’équipe a utilisé un réseau de diffraction qui fonctionne comme un prisme, fractionnant les fréquences en s’éloignant de la source. Les modifications permettent une plus grande zone de couverture sans compromettre la profondeur ou la précision. Le système a une précision de localisation sans précédent et un débit de données suffisamment rapide pour capturer des parties du corps humain en mouvement de manière très détaillée et en temps réel.
« De la même manière que les caméras électroniques sont devenues omniprésentes, notre vision est de développer une nouvelle génération de caméras 3D à base de lidar qui sont suffisamment rapides et capables de permettre l’intégration de la vision 3D dans toutes sortes de produits », co-auteur de l’étude dit Joseph Izatt. « Le monde qui nous entoure est en 3D, donc si nous voulons que les robots et autres systèmes automatisés interagissent avec nous naturellement et en toute sécurité, ils doivent pouvoir nous voir aussi bien que nous pouvons les voir. »
La source: NSF